
Primary considerations for selecting electric linear actuators when designing robotics
 Linear Actuators with complex multi-axis systems are proving to be indispensable in today’s continuously evolving industrial automation world.
Linear Actuators with complex multi-axis systems are proving to be indispensable in today’s continuously evolving industrial automation world.
These systems are highly effective in positioning, handling, and transporting components quickly and reliably. Some of the many applications for linear actuator systems include machine tool, welding, painting, assembly, picking and packaging operations.
To ensure machine designers can continue to meet the complex challenges of their end customers, it is important to select the proper linear actuator technology that best satisfies the application's requirements. We will explore each of these in more detail below.
Equipment developers should also select the highest quality components while collaborating with an experienced linear motion design team that specializes in projects involving customized linear axis systems. This will ultimately ensure an optimal cost Vs. performance return on investment by increasing flexibility and productivity while reducing down times.
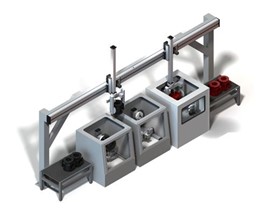
Part Handling System in Workflow
Highly flexible integration is a primary characteristic of fully automated systems that align with the challenging demands of Industry 4.0. The includes combining multiple work steps within a small space while making the work cycle as fast as possible. In addition, it is critical to have the ability to readjust the workspace as the product requirements continue to evolve.
 Robots on Rails
Robots on Rails
The robotic range of motion can be increased to provide more time for additional tasks within a given work cycle. This is accomplished by mounting the robot to a linear actuator rail system that moves the robot back and forth. As a result, the work area can now be designed with more flexibility to allow the integration of other tasks.
Robots on the seventh axis: Toothed belt linear axes provide the robustness and positioning precision necessary for this application. A good linear actuator system will provide a broad solution space, allowing the linear axes to be precisely adjusted to both the robot and production environment. Key factors include precision, load capacity, drive stiffness and smooth/reliable rail operation.
Multi-axis electric linear actuators provide robotics with the increased freedom of movement by removing the limitations of a fixed operating position (allowing them to move in multiple directions). This significantly increases the overall productivity of a robotic system.
Selecting a Linear Actuator for Robotics
Let's identify the some of the commonly used devices for robotic applications. There are different categories of robotic linear actuators. Robotic actuators are classified based on their ability (energy) to move a motor output shaft. Linear Actuators will only move in a linear fashion, while Rotary Actuators only rotate in an axis.
Motor Types
- Stepper Motors - DC motors that move in discrete steps. They utilize multiple sets of coils arranged in groups or “phases“. The motor will rotate or "step" as each phase is sequentially triggered. Stepper motors are typically used when high precision in movement is required.
- DC Motors - The output shaft spins when a DC voltage is applied across the motor terminals. Motor shaft speed is adjusted based on the magnitude of this voltage.
- Servo Motors - Consist of a DC motor, gear system, and control unit. The control unit rotates the gear shaft with a specific angle based on PWN signals sent from the robot's computer. There both analog servos and digital servo types. Smart digital servos are now available in the market that provide position, speed, torque, and temperature feedback.
- DC Gearbox - Adding a gearbox to a DC motor increases the shaft torque while reducing the motor speed. They consist of a DC motor attached with a gear system with an output shaft.
 Electric Actuator with Motor
Electric Actuator with Motor 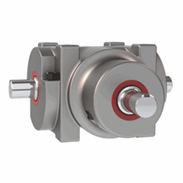 Gearbox
Gearbox
Linear Actuator Types
- Hydraulic Actuators - Typically used in handling heavy loads. They can produce very high force in comparison to other actuators. The chamber is filled with hydraulic fluid. Pressure applied to the fluid pushes the piston (moving the output shaft).
- Advantages: Easy to Control, Fairly Accurate, Constant Force (regardless of speed change), Low Noise
- Disadvantages: Messy Maintenance, Expensive, Fluid Leakage not Environmentally Friendly
- Pneumatic Actuators - Similar to hydraulic actuators, however, they use compressed air to move the piston.
- Advantages: Less Environmental Pollution (Cleaner), Inexpensive, Safe and Easy Operation
- Disadvantages: Loud Noise, Less Accurate, Sensitive to Vibration
- Electric Actuators - The most commonly used linear actuators in robotics. They convert electric energy into linear motion. There are AC and DC actuators, however most robotic applications utilize DC linear actuators.
- Advantages: The highest precision, easy to network and program, immediate feedback for diagnostics, complete motion profile control using encoders (velocity/position/torque), less noises, no fluid leak (environmentally friendly)
- Disadvantages: Higher Initial Cost (But lower overall cost of ownership)

Automated Pick and Place System
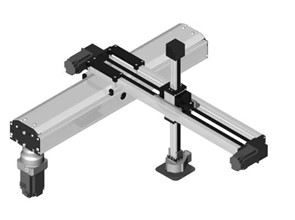
Modular Linear Actuators
Increased Flexibility and Faster Cycle Times for Robotics
Electric Modular Linear Actuators allow provide industrial robots with the ability to reliably execute highly automated motion sequences at a consistently high level of accuracy and speed. Servo-driven modular linear actuators can be integrated into high-performance automation systems for multi-axis-coordinated motion control.
Modular linear actuators foster easy Industry 4.0 "compatibility" and align well with the growing e-mobility market. These electric linear actuator systems provide machine developers with customized drive technology that fits seamlessly into their ever-changing designs. The modular built-in axes make it much easier to modify or convert machines later as requirements change down the road. In addition to footprint flexibility, synchronization, and work step transition are also much easier.
System designers can optimize the linear axes based on each individual application. For example, they can be specially optimized as a Z axis or customized as X and Y axes. This high degree of vertical integration makes it possible to build linear axes for manufacturing lines that best optimize the available space, while also saving energy and material.
Do you need assistance with a linear motion automation application?