
Learn the primary considerations on which electrical and mechanical engineers should collaborate early in the development process to effectively implement linear motion solutions.
The use of electromechanical, or mechatronic, solutions in automated industrial systems continues to grow. This technology is developed via multidisciplinary branches of engineering with focus on both electrical and mechanical systems to create a complete integrated design. Emphasis has expanded to include combinations of robotics, electronics, Industrial Internet of Things (IIoT) systems and controls.
Some of the many applications include machine tool, packaging, material handling, assembly, test and measurement, medical, robotics, and automation.
Modular linear actuators are flexible high-speed/precision positioning systems that provide motion using a drive and guidance device. They can be used as a single axis solution or configured for a multitude of gantry XY and XYZ positioning duties, including pick-and-place, part transfer, dispensing, handling, packing, and palletizing.
This technology is ideal for many electromechanical automated systems in terms of cost, performance, reliability, efficiency, and environmental benefits. Linear motion components are a core mechanical factor of many electromechanical systems; about half of the Rockwell Automation servo motors in use are connected to linear solutions.
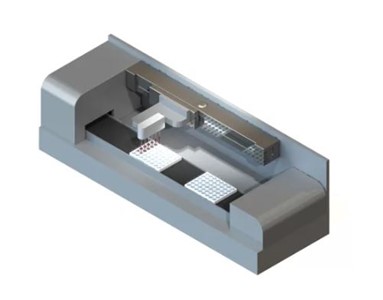 X-Y Positioning in Medical Diagnostics
X-Y Positioning in Medical Diagnostics
Mechanical Criteria First
When designing automated industrial systems, first consider the functionality of mechanical components. They’re designed before electrical in about 90% of applications, because mechanical engineers need to define the initial requirements before the ideal electrical components can be specified.
For example, electrical engineers wouldn’t be able to properly size a servo motor until the mechanical engineers have determined the motor drive and specifications for load, direction, duty cycle and accuracy.
Collaborative Development
As more companies strive to integrate completely engineered solutions of various technologies, remember that automation system optimization stems from open communication between electrical and mechanical engineers early in the development process. Effective collaboration between the two fields facilitates timely and efficient development of the proper integrated solution.
It’s important that mechanical and electrical engineers collaborate to understand how their applications will function together. Rather than simply thinking about the motor, engineers need to consider the entire machine functionality for the specific application, including the environment in which it will operate.

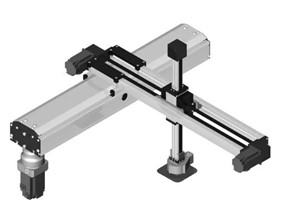
Complete XYZ Gantry System
Design Considerations
When you’re looking at a possible replacement or upgrade for an existing industrial system, modular linear actuator systems can offer advantages in most applications. Resources to implement electromechanical solutions are available to make first-time design easier and subsequent designs repeatable.
However, as mechanical and electric components continue to be integrated, several special factors must be considered together when outlining how an automated system will be constructed.
The primary factors to consider when selecting modular linear actuator components are:
- Accuracy.
- Speed.
- Load.
- Cost.
- Maintainability.
- Safety.
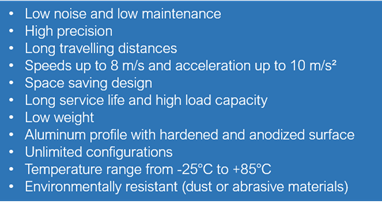
Linear modular actuators provide high accuracy at increased speeds, and they have a significantly low cost of ownership over time — minimal maintenance with high reliability. In addition, they have a clean operation — can be used in hygienic environments — and provide a safe option to protect users.
When considering these factors for an electromechanical system versus other technologies, there can be multiple ways to solve one application, such as belt drives, ball screws, rack and pinion, or linear motors. All four variations differ in accuracy, speed, load, and cost.
Key Modular Linear Actuator Principles
A few key principles for designers when using modular linear actuator technology in an electromechanical industrial automation application include:
1. Acceleration/Deceleration > When integrating systems, properly calculate the acceleration and deceleration rates. This can prevent over acceleration, which can cause a variety of problems such as breakage, injured operators or skidding/deforming balls in the screw.
2. Temperature and Duty Cycle > Basic duty-cycle questions include:
How often is the load moving?
- If it is moving, is it continuous?
- If it’s continuous, how often will it be lubricated? An increase in temperature can affect the properties of some components resulting in accelerated wear, damage and possible unexpected failure.
3. Drive Type > Drive options include screw (ACME or ball), belt, or rack and pinion or linear motor. Linear motors are highly accurate, although they can be costly. However, they’re becoming more popular as costs continue to decline. Screws are accurate, but don’t provide the high speed compared to linear motors. Belt drives provide high speed and can handle long travel lengths.
4. Carriage > Carriage types include single, dual, wrap-around, or extended.
5. Guidance > How is the load guided? This consideration is often overlooked during the development process. There are multiple ways to guide a load, including V-groove, profile rail, and internal/external roller bearing. Regardless of what is being moved, there must be a way to support it.
When considering these factors for an electromechanical system versus other technologies, there can be multiple ways to solve one application such as belt drives, ball screws, rack & pinion, or linear motors. All four variations differ in accuracy, speed, load, and cost. This will ultimately steer selection of the electromechanical linear motion solution.
Modular Linear Actuator Product Guide

Do you have a unique linear motion challenge that requires precise and reliable XY or XYZ positioning?