Warning! This product is obsolete. See Thomson linear unit sizing tool for current product offering.

ELZU 60
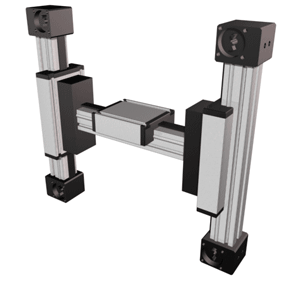
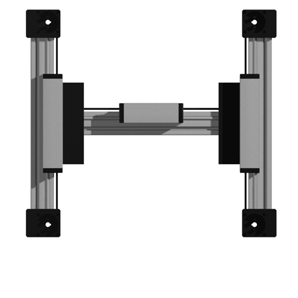
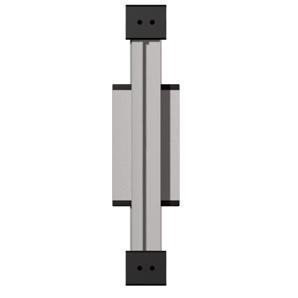
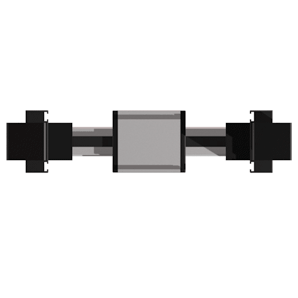
Modular Linear Actuator, External Roller Bearing Guided, External Belt Driven, Model ELZU, 60
Read More
Product Specifications
Product Specifications
Product Specifications
Details
- Size:
- 60
- Belt:
- 5M25
- mm/Rev:
- 130
- Number of Teeth:
- 26
Dimensions
- Basic length Lx [mm]:
- 426
- Basic length Ly [mm]:
- 330
- A [mm]:
- 144
- B [mm]:
- 96
- C [mm]:
- 80
- D [mm]:
- 47
- E [mm]:
- 30
- F [mm]:
- 42
- G [mm]:
- -
- H [mm]:
- -
- I [mm]:
- 33
- J [mm]:
- 82
- K [mm]:
- 90
- MM:
- -
- N:
- M8
- OO:
- M8
- P [mm]:
- 59
- Qx [mm]:
- 168
- Qy [mm]:
- 208
- T:
- M6
- V [mm]:
- 123
- X [mm]:
- 26
- Y [mm]:
- 26
- Shaft Diameter and Length [mm]:
- 14 x 35
- Key:
- 5x5x28
Speed
- Speed Maximum [m/s]:
- 5
Forces and Torques
- No-load torque [Nm]:
- 1.2
- Tensile force 0.2 sec [N]:
- 1000
- Tensile force permanent [N]:
- 900
- Fx dynamic [N]:
- 800
- Fy dynamic [N]:
- 2000
- Fz dynamic [N]:
- 1100
- Mx dynamic [Nm]:
- 43
- My dynamic [Nm]:
- 70
- Mz dynamic [Nm]:
- 100
- Fx static [N]:
- 894
- Fy static [N]:
- 3000
- Fz static [N]:
- 1700
- Mx static [Nm]:
- 67
- My static [Nm]:
- 90
- Mz static [Nm]:
- 120
Geometrical moments of inertia of aluminum profile
- Elastic modulus [N/mm2]:
- 70000
- lx [mm4]:
- 679000
- ly [mm4]:
- 697000
Weight
- Additional Weight per 100 mm [kg]:
- 0.62
- Basic Weight [kg]:
- 14.7
Values for Calulating Inertias
- Pulley Material:
- Steel
- Pulley Diameter [mm]:
- 41.38
- Effective Pulley Width [mm]:
- 80
- Belt Weight [kg/m]:
- 0.123
- Standard Carriage Weight [kg]:
- 1.57
- No-load torque [Nm]:
- 0.6
- Friction Coefficient:
- 0.01
More Details
The carriage is driven by an external linear belt that can be adjusted to reduce lash and is driven along the external roller bearings. The pulleys have maintenance-free ball bearings. Belt tension can be readjusted by a simple screw adjustment device in the carriage.
The ELZU consisting of two Y-axes and single X-axis, driven by one rotating belt. This belt runs around different deflection pulleys. Positioning is achieved by two motors. The coordinate is diagonal to the deflection points of the Y-axis. Advantage: A smaller amount of inertia is needed, thus enabling high accelerations to be achieved.

